DESIGNATION // Industrial Surveillance // High-Mobility Alpha
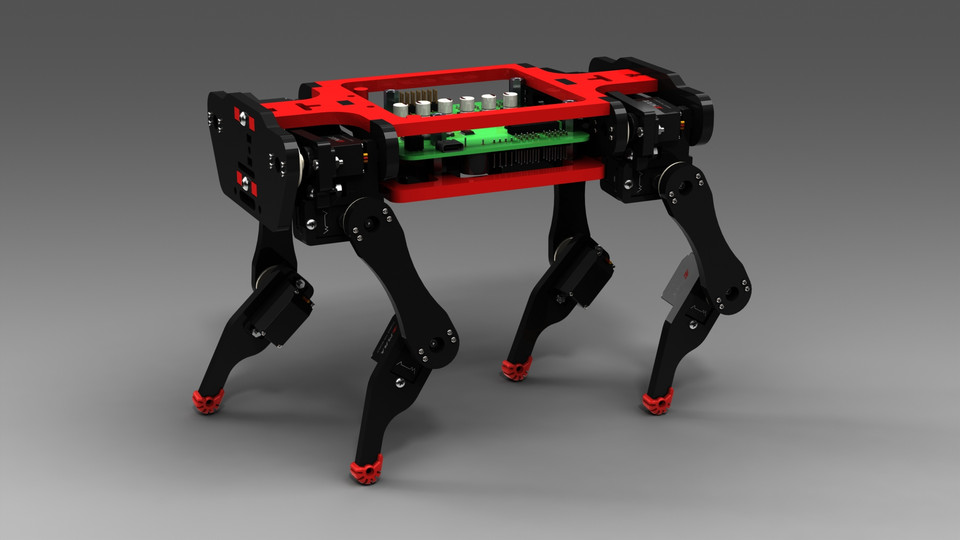
QuadGuard
A quadruped platform currently in extreme R&D. Targeting autonomous surveillance, obstruction avoidance, and human-assistance payload capabilities in highly unpredictable physical spaces.
System Specifications
- Native Architecture // Built in India
- Heavy Payload Transport target
- GPS-Denied Autonomous Pathfinding
- Integrated Thermal & Acoustic Fusion
- Dynamic Obstacle Avoidance
- Operator Assist Protocols